pynol.learner¶
base¶
This module provides different base algorithms. On the one hand, they can be used to optimize static regret directly, on the other hand, they are crucial components for algorithms designed to optimize dynamic regret and adaptive regret.
Base¶
- class pynol.learner.base.Base(domain: Domain, step_size: float | ndarray, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ABCAn abstract class for base algorithms.
- Parameters:
domain (Domain) – Feasible set for the base algorithm. step_size (float, numpy.ndarray): Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round $t$.prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
- get_step_size()[source]¶
Get the step size at each round.
- Returns:
Step size at the current round.
- Return type:
float
- opt(env: Environment)[source]¶
The optimization process of the base algorithm.
All base algorithms are divided into two parts:
opt_by_optimism()at the beginning of current round andopt_by_gradient()at the end of current round.- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): Decision at the current round.
loss (float): Origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
- abstract opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
OGD¶
- class pynol.learner.base.OGD(domain: Domain, step_size: float | ndarray, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseImplementation of Online Gradient Descent.
OGDstands for Online Gradient Descent, the most popular algorithm for online learning. OGD updates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}} [x_t - \eta_t \nabla f_t(x_t)]\]where \(\eta_t > 0\) is the step size at round t, and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round $t$.prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
BGDOnePoint¶
- class pynol.learner.base.BGDOnePoint(domain: Domain, step_size: float | ndarray, scale_perturb: float, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseImplementation of Bandit Convex Optimization with one-point feedback.
BGDOnePointstands for Bandit Convex Optimization with one-point feedback, in which at each round the learner submits one decision and then can only observe the function value of this point.BGDOnePointupdates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}}[x_t - \eta_t \tilde{g}_t] \mbox{ with } \tilde{g}_t = \frac{d}{\delta}f_t(x_t + \delta s_t) \cdot s_t,\]where \(\eta_t > 0\) is the step size at round t, \(d\) is the dimension, \(\delta\) is the scale of the perturbation, \(s_t\) is the unit vector selected uniformly at random and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round $t$.scale_perturb (float) – Scale of perturbation \(\delta\).
prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
https://arxiv.org/abs/cs/0408007
- get_grad(dimension, loss, unit_vec) ndarray[source]¶
Estimate the gradient by \(\tilde{g}_t = \frac{d}{\delta}f_t(x_t + \delta s_t) \cdot s_t\).
- Parameters:
dimension (int) – Dimension of the decision.
loss (float) – Loss of the submitted decision.
unit_vec (numpy.ndarray) – Unit vector used to perturb the decision.
- Returns:
the estimated gradient at the current round.
- Return type:
numpy.ndarray
- opt_by_gradient(env: Environment)[source]¶
Optimize by the estimated gradient.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): Decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): Surrogate loss at the current round.
- Return type:
tuple
BGDTwoPoint¶
- class pynol.learner.base.BGDTwoPoint(domain: Domain, step_size: float | list, scale_perturb: float, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseImplementation of Bandit Convex Optimization with Two-point Feedback.
BGDTwoPointstands for Bandit Convex Optimization with two-point feedback, in which at each round the learner submits two decisions and then can only observe the function values of these two points.BGDTwoPointupdates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}} [x_t - \eta_t \tilde{g}_t] \mbox{ with } \tilde{g}_t = \frac{d}{2\delta}(f_t(x_t + \delta s_t) - f_t(x_t - \delta s_t))\cdot s_t,\]where \(\eta_t > 0\) is the step size at round t, \(d\) is the dimension, \(\delta\) is the scale of the perturbation, \(s_t\) is the unit vector selected uniformly at random, and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round $t$.scale_perturb (float) – Scale of perturbation \(\delta\).
prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
https://alekhagarwal.net/bandits-colt.pdf
- get_grad(dimension, loss1, loss2, unit_vec)[source]¶
Estimate the gradient by \(\tilde{g}_t = \frac{d}{2\delta}(f_t(x_t + \delta s_t) - f_t(x_t - \delta s_t))\cdot s_t\).
- Parameters:
dimension (int) – Dimension of the decision.
loss1 (float) – Loss of the first submitted decision.
loss2 (float) – Loss of the second submitted decision.
unit_vec (numpy.ndarray) – Unit vector used to perturb the decision.
- Returns:
Estimated gradient at the current round.
- Return type:
numpy.ndarray
- opt_by_gradient(env: Environment)[source]¶
Optimize by the estimated gradient.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): Average decision at the current round.
loss (float): Average origin loss at the current round.
surrogate_loss (float): Average surrogate loss at the current round.
- Return type:
tuple
SOGD¶
- class pynol.learner.base.SOGD(domain: Domain, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseImplementation of scale-free online learning.
SOGDstands for Scale-free Online Gradient Descent, an online convex optimization algorithm that achieves parameter-free and scale-free simultaneously, which is useful in deriving small-loss bound for smooth functions.SOGDupdates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}}[x_t - \frac{1}{\sqrt{\delta + \sum_{s=1}^{t-1} \nabla f_s(x_s)}} \nabla f_t(x_t)]\]where \(\delta\) is a small constant to avoid divide by \(0\), and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\). We set \(\delta=1\) in our implementation.
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
https://arxiv.org/abs/1601.01974
- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
OptimisticBase¶
- class pynol.learner.base.OptimisticBase(domain: Domain, step_size: float | list, optimism_type: str = 'external', prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseAn abstract class for optimistic-type base algorithms.
The optimistic-type algorithms are very general and useful, and they can achieve a tighter regret guarantee with benign “predictable sequences”. There are mainly two types of optimistic algorithms: Optimistic Online Mirror Descent (Optimistic OMD) and Optimistic Follow The Regularized Leader (Optimistic FTRL). The general update rule of
Optimistic OMDis as follows,\[ \begin{align}\begin{aligned}x_t = {\arg\min}_{x \in \mathcal{X}} \ \eta_t \langle m_t, x\rangle + D_R(x, \hat{x}_t)\\\hat{x}_{t+1} = {\arg\min}_{x \in \mathcal{X}} \ \eta_t \langle \nabla f_t(x_t), x\rangle + D_R(x, \hat{x}_t),\end{aligned}\end{align} \]and the general update rule of
Optimistic FTRLis as follows,\[x_t = {\arg\min}_{x \in \mathcal{X}} \ \eta_t \langle \sum_{s=1}^{t-1} \nabla f_s(x_s) + m_t, x\rangle + R(x),\]where \(\eta_t\) is the step size at round \(t\), \(m_t\) is the optimism at the beginning of round \(t\), serving as a guess of the true gradient \(\nabla f_t(x_t)\) at round \(t\), \(R\) is the regularizer and \(D_R(\cdot, \cdot)\) is the Bregman divergence with respect to the regularizer \(R\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round \(t\).optimism_type (str, optional) – Type of optimism used for algorithm. Valid actions include
external,last_grad,middle_gradandNone. ifoptimism_type='external', the algorithm will accept the external specified \(m_t\) by the environment at each round; ifoptimism_type='last_grad', the optimism is set as \(m_t = \nabla f_{t-1}(x_{t-1})\); ifoptimism_type='middle_grad', the optimism is set as \(m_t = \nabla f_{t-1}(\hat{x}_t)\), and ifoptimism_type=None, the optimism is set as \(m_t = 0\).prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
https://proceedings.mlr.press/v23/chiang12.html
- compute_internal_optimism(env: Environment)[source]¶
Compute the internal optimism.
- Parameters:
env (Environment) – Environment at the current round.
OptimisticOGD¶
- class pynol.learner.base.OptimisticOGD(domain: Domain, step_size: float | list, optimism_type: str = 'external', prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
OptimisticBaseImplementation of Optimistic Online Gradient Descent.
OptimisticOGDis an online convex optimization algorithm, which is a specialization ofOptimistic OMDwith the Euclidean distance as the regularizer.OptimisticOGDupdates the decision \(x_{t}\) by\[ \begin{align}\begin{aligned}x_t = \Pi_{\mathcal{X}}[\hat{x}_t - \eta_t m_t]\\\hat{x}_{t+1} = \Pi_{\mathcal{X}}[\hat{x}_t - \eta_t \nabla f_t(x_t)],\end{aligned}\end{align} \]where \(\eta_t > 0\) is the step size at round \(t\), \(m_t\) is the optimism at the beginning of round \(t\), and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round \(t\).optimism_type (str, optional) – Type of optimism used for algorithm. Valid actions include
external,last_grad,middle_gradandNone. ifoptimism_type='external', the algorithm will accept the external specified \(m_t\) by the environment at each round; ifoptimism_type='last_grad', the optimism is set as \(m_t = \nabla f_{t-1}(x_{t-1})\); ifoptimism_type='middle_grad', the optimism is set as \(m_t = \nabla f_{t-1}(\hat{x}_t)\), and ifoptimism_type=None, the optimism is set as \(m_t = 0\).prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
Note
OGDis a special case ofOptimisticOGDwithoptimism_type=None.OEGDis a special case ofOptimisticOGDwithoptimism_type='middle_grad.
References
https://proceedings.mlr.press/v30/Rakhlin13.html
- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
OEGD¶
- class pynol.learner.base.OEGD(domain: Domain, step_size: float | ndarray, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
BaseImplementation of online extra-gradient descent.
OEGDstands for Online Extra-Gradient Descent. It is shown to enjoy gradient-variation regret guarantee, which would be smaller when the environments evolve gradually.OEGDupdates decision \(x_t\) by\[ \begin{align}\begin{aligned}x_t = \Pi_{\mathcal{X}}[\hat{x}_t - \eta_t \nabla f_{t-1}(\hat{x}_t)],\\\hat{x}_{t+1} = \Pi_{\mathcal{X}}[\hat{x}_t - \eta_t \nabla f_t(x_t)],\end{aligned}\end{align} \]where \(\eta_t > 0\) is is the step size at round \(t\), and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round $t$.prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
https://proceedings.mlr.press/v23/chiang12.html
- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
Hedge¶
- class pynol.learner.base.Hedge(domain: Domain, step_size: float | list, is_lazy: bool = False, correct: bool = False, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
OptimisticHedgeImplementation of Hedge.
Hedgeis the most popular algorithm for tracking the best expert problem. There are two versions ofHedge: the greedy version and the lazy version. The greedy version is a special case ofOptimistic OMDwith the negative entropy as the regularizer andoptimism_type=Noneand the lazy version is a special case ofOptimistic FTRLwith the negative entropy as the regularizer andoptimism_type=None. The greedy versionHedgeupdates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}}[x_t\exp(-\eta_t (\nabla f_t({x}_t) +a_t))],\]and the lazy version
Hedgeupdates the decision \(x_{t+1}\) by\[x_{t+1} = \Pi_{\mathcal{X}}[x_1 \exp(-\eta_t (\sum_{s=1}^{t} (\nabla f_s(x_s) +a_s)))],\]where \(\eta_t > 0\) is the step size, \(a_t\) is the correction term at round \(t\), and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – the step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round \(t\).is_lazy (bool) – Type of the update version: lazy or greedy. The default is False.
correct (bool) – Whether to use correction term. \(a_t\) is set as \(a_t = \nabla f_t(x_t)^2\) if
correct=Trueand \(a_t=0\) otherwise. The default is False.prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
OptimisticHedge¶
- class pynol.learner.base.OptimisticHedge(domain: Domain, step_size: float | list, optimism_type: str = 'external', is_lazy: bool = False, correct: bool = False, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
OptimisticBaseImplementation of Optimistic Hedge.
Hedgeis the most popular algorithm for tracking the best expert problem.Optimistic Hedgeis an enhanced version ofHedgewhich can further incorporate the knowledge of predictable sequences. There are two versions ofOptimistic Hedge: the greedy version and the lazy version. The greedy version is a special case ofOptimistic OMDwith the negative entropy as the regularizer and the lazy version is a special case ofOptimistic FTRL. The greedy versionOptimistic Hedgeupdates the decision \(x_t\) by\[ \begin{align}\begin{aligned}{x}_t = \Pi_{\mathcal{X}}[\hat{x}_{t} \exp(-\eta_t m_{t})]\\\hat{x}_{t+1} = \Pi_{\mathcal{X}}[\hat{x}_t\exp(-\eta_t (\nabla f_t({x}_t) +a_t))],\end{aligned}\end{align} \]and the lazy version
Optimistic Hedgeupdates the decision \(x_t\) by\[x_t = \Pi_{\mathcal{X}}[x_1 \exp(-\eta_t (\sum_{s=1}^{t-1} (\nabla f_s(x_s) +a_s) + m_t))],\]where \(\eta_t > 0\) is the step size at round \(t\), \(m_t\) is the optimism at the beginning of round \(t\), \(a_t\) is the correction term and \(\Pi_{\mathcal{X}}[\cdot]\) denotes the projection onto the nearest point in \(\mathcal{X}\).
- Parameters:
domain (Domain) – Feasible set for the base algorithm.
step_size (float, numpy.ndarray) – Step size \(\eta\) for the base algorithm. Valid types include
floatandnumpy.ndarray. If the type of the step size \(\eta\) is float, the algorithm will use the fixed step size all the time, otherwise, the algorithm will use the step size \(\eta_t\) at round \(t\).optimism_type (str, optional) – Type of optimism used for algorithm. Valid actions include
external,last_grad,middle_gradandNone. ifoptimism_type='external', the algorithm will accept the external specified \(m_t\) by the environment at each round; ifoptimism_type='last_grad', the optimism is set as \(m_t = \nabla f_{t-1}(x_{t-1})\); ifoptimism_type='middle_grad', the optimism is set as \(m_t = \nabla f_{t-1}(\hat{x}_t)\), and ifoptimism_type=None, the optimism is set as \(m_t = 0\).is_lazy (bool) – Type of the update version: lazy or greedy. The default is False.
correct (bool) – Whether to use correction term. \(a_t\) is set as \(a_t = \eta_t (\nabla f_t(x_t) - m_t)^2\) if
correct=Trueand \(a_t=0\) otherwise. The default is False.prior (str, numpy.ndarray, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).seed (int, optional) – The initial decision of the algorithm is set as
domain.init_x(prior, seed).
References
http://proceedings.mlr.press/v30/Rakhlin13.pdf
Note
1. Greedy version
Optimistic Hedgeis a special case ofOptimisticOMDwith the negative entropy as the regularizer.2. Lazy version
Optimistic Hedgeis a special case ofOptimisticFTRLwith the negative entropy as the regularizer.- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
meta¶
This module provides different meta algorithms. On the one hand, they can be used to solve the expert-tracking problem directly, on the other hand, they are crucial components to combine the base-learners to optimize dynamic regret and adaptive regret.
Meta¶
- class pynol.learner.meta.Meta(prob: ndarray, lr: float | ndarray | OptimisticLR)[source]¶
Bases:
ABCAn abstract class for meta-algorithms.
- Parameters:
prob (numpy.ndarray) – Initial probability over the base-learners.
lr (float, numpy.ndarray, OptimisticLR) – Learning rate for meta-algorithm.
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- get_lr()[source]¶
Compute the learning rate for meta-algorithms.
If the type of the learning rate \(\varepsilon\) is
float, this method will return the constant learning rate \(\varepsilon\) all the time; if the type of \(\varepsilon\) isnumpy.ndarraywith shape[T, ], this method will return a scalar \(\varepsilon[t]\) at round \(t\); if the type of \(\varepsilon\) isnumpy.ndarraywith shape[T, N]where \(N\) is the dimension, this method will return a vector \(\varepsilon[t]\) at time \(t\); if the type of \(\varepsilon\) isnumpy.ndarraywith shape[1, N], this method will return a vector \(\varepsilon\) all the time; if the type of \(\varepsilon\) isOptimisticLR(), the learning rate \(\varepsilon_t\) is computed bycompute_lr()at round \(t\).
- property init_prob¶
Get the initial probability over the current alive base-learners.
- opt(loss_bases: ndarray, loss_meta: float | None = None, optimism: ndarray | None = None)[source]¶
The optimization process of the meta-algorithm.
All base algorithms are divided into two parts:
opt_by_optimism()at the beginning of current round andopt_by_gradient()at the end of current round.- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float, optional) – Loss of the combined decision.
optimism (numpy.ndarray) – Optimism at the beginning of the current round, serving as a guess of
loss_bases.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
- abstract opt_by_gradient(loss_bases: ndarray, loss_meta: float | None = None)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
- opt_by_optimism(optimism: ndarray | None)[source]¶
Optimize by the optimism.
- Parameters:
optimism (numpy.ndarray, optional) – the optimism at the beginning of the current round.
- Returns:
None
- property prob¶
Get the current probability over the alive base-learners.
Hedge¶
- class pynol.learner.meta.Hedge(prob: ndarray, lr: float | ndarray | OptimisticLR, is_lazy: bool = False, correct: bool = False)[source]¶
Bases:
OptimisticHedgeImplementation of Hedge.
Hedgeis the most popular algorithm for tracking the best expert problem. There are two versions ofHedge: the greedy version and the lazy version. The greedy version is a special case ofOptimistic OMDwith the negative entropy as the regularizer andoptimism_type=Noneand the lazy version is a special case ofOptimistic FTRLwith the negative entropy as the regularizer andoptimism_type=None. The greedy versionHedgeupdates the decision \(p_{t+1}\) by\[p_{t+1, i} \propto p_{t,i} \exp \Big(-\varepsilon_t (\ell_{t,i} + b_{t,i}) \Big), \forall i \in [N],\]and the lazy version
Hedgeupdates the decision \(p_{t+1}\) by\[p_{t+1, i} \propto p_{1,i} \exp \Big(-\varepsilon_t \sum_{s=1}^{t} (\ell_{s,i} + b_{s,i})\Big), \forall i \in [N],\]where \(\varepsilon_t > 0\) is the step size, \(b_t\) is the correction term at round \(t\).
- Parameters:
prob (numpy.ndarray) – Initial probability over the base-learners.
lr (float, numpy.ndarray, OptimisticLR) – The learning rate for meta-algorithm.
is_lazy (bool) – Type of the update version: lazy or greedy. The default is False.
correct (bool) – Whether to use correction term. \(b_t\) is set as \(b_t = \varepsilon_t \ell_t^2\) if
correct=Trueand \(b_t=0\) otherwise. The default is False.
References
http://proceedings.mlr.press/v30/Rakhlin13.pdf
Note
Hedgeis a special case ofOptimisticHedgewithoptimism_type=None.
OptimisticMeta¶
- class pynol.learner.meta.OptimisticMeta(prob: ndarray, lr: float | ndarray | OptimisticLR, optimism_type: str | None = 'external')[source]¶
Bases:
MetaAn abstract class for optimistic-type base algorithms.
The optimistic-type algorithms are very general and useful, and they can achieve a tighter regret guarantee with benign “predictable sequences”. There are mainly two types of optimistic algorithms: Optimistic Online Mirror Descent (Optimistic OMD) and Optimistic Follow The Regularized Leader (Optimistic FTRL). The general update rule of
Optimistic OMDis as follows,\[ \begin{align}\begin{aligned}p_t = {\arg\min}_{p \in \Delta_N} \ \varepsilon_t \langle M_t, p\rangle + D_R(p, \hat{p}_t)\\\hat{p}_{t+1} = {\arg\min}_{x \in \Delta_N} \ \varepsilon_t \langle \ell_t, p\rangle + D_R(p, \hat{p}_t),\end{aligned}\end{align} \]and the general update rule of
Optimistic FTRLis as follows,\[p_t = {\arg\min}_{x \in \Delta_N} \ \varepsilon_t \langle \sum_{s=1}^{t-1} \ell_s + M_t, x\rangle + R(x),\]where \(\varepsilon_t\) is the step size at round \(t\), \(M_t\) is the optimism at the beginning of round \(t\), serving as a guess of the true gradient \(\ell_t\) at round \(t\), \(R\) is the regularizer and \(D_R(\cdot, \cdot)\) is the Bregman divergence with respect to the regularizer \(R\).
- Parameters:
prob (numpy.ndarray) – The initial probability over the base-learners.
lr (float, numpy.ndarray, OptimisticLR) – The learning rate for meta-algorithm.
optimism_type (str, optional) – the type of optimism used for algorithm. Valid actions include
external,last_lossandNone. ifoptimism_type='external', the algorithm will accept the external optimism \(M_t\) at each round; ifoptimism_type='last_loss', the optimism is set as \(M_t = \ell_{t-1}\); and ifoptimism_type=None, the optimism is set as \(M_t = 0\).
References
https://proceedings.mlr.press/v23/chiang12.html
- compute_internal_optimism(loss_bases: ndarray)[source]¶
Compute the internal optimism for the next round.
If
optimism_type='last_loss', the interval optimism is set as \(M_t = \ell_{t-1}\).- Parameters:
loss_bases (numpy.ndarray) – Losses of base-learners at the current round.
- property middle_prob¶
Get the current intermediate probability over the alive base-learners.
- property optimism¶
Get the current optimism of the alive base-learners.
OptimisticLR¶
- class pynol.learner.meta.OptimisticLR(scale: float = 1.0, norm: int = inf, order: int = 2, upper_bound: float = 1.0)[source]¶
Bases:
objectAn self-confident tuning method for optimistic algorithms.
The update rule of the optimistic learning rate is
\[\varepsilon_t = \frac{\alpha}{\sqrt{\sum_{s=1}^{t-1}\lVert \ell_t - M_t \rVert_p^q}},\]where \(\alpha\) is the scale parameter, \(p\) is the norm order and :math`q` is the order.
- Parameters:
scale (float) – Scale parameter.
norm (int, inf) – Order of norm \(p\).
order (int) – Order of the norm value \(q\).
upper_bound (float) – Upper bound of learning rate.
OptimisticHedge¶
- class pynol.learner.meta.OptimisticHedge(prob: ndarray, lr: float | ndarray | OptimisticLR, optimism_type: str | None = 'external', is_lazy: bool = False, correct: bool = False)[source]¶
Bases:
OptimisticMetaImplementation of Optimistic Hedge.
Hedgeis the most popular algorithm for tracking the best expert problem.Optimistic Hedgeis an enhanced version ofHedgewhich can further incorporate the knowledge of predictable sequences. There are two versions ofOptimistic Hedge: the greedy version and the lazy version. The greedy version is a special case ofOptimistic OMDwith the negative entropy as the regularizer and the lazy version is a special case ofOptimistic FTRL. The greedy versionOptimistic Hedgeupdates the decision \(p_t\) by\[ \begin{align}\begin{aligned}{p}_{t, i} = \frac{\hat{p}_{t,i}\exp(-\varepsilon_t M_{t,i})}{\sum_{j=1}^N \hat{p}_{t,j} \exp(-\varepsilon_t M_{t,j})}, \forall i \in [N]\\\hat{p}_{t+1, i} = \frac{\hat{p}_{t,i}\exp(-\varepsilon_t (\ell_{t,i} + b_{t,i}))}{\sum_{j=1}^N \hat{p}_{t,j} \exp(-\varepsilon_t (\ell_{t,j}+ b_{t,j}))}, \forall i \in [N],\end{aligned}\end{align} \]and the lazy version
Optimistic Hedgeupdates the decision \(x_t\) by\[p_{t, i} \propto p_{1,i} \exp \Big(-\varepsilon_t (\sum_{s=1}^{t-1} (\ell_{s,i} + b_{s,i})+ m_{t,i})\Big), \forall i \in [N],\]where \(\varepsilon_t > 0\) is the learning rate at round \(t\), \(M_t\) is the optimism at the beginning of round \(t\), \(b_t\) is the correction term.
- Parameters:
prob (numpy.ndarray) – Initial probability over the base-learners.
lr (float, numpy.ndarray, OptimisticLR) – The learning rate for meta-algorithm.
optimism_type (str, optional) – Type of optimism used for algorithm. Valid actions include
external,last_lossandNone. ifoptimism_type='external', the algorithm will accept the external optimism \(M_t\) at each round; ifoptimism_type='last_loss', the optimism is set as \(M_t = \ell_{t-1}\); and ifoptimism_type=None, the optimism is set as \(M_t = 0\).is_lazy (bool) – Type of the update version: lazy or greedy. The default is False.
correct (bool) – Whether to use correction term. \(b_t\) is set as \(b_t = \varepsilon_t (\ell_t-M_t)^2\) if
correct=Trueand \(b_t=0\) otherwise. The default is False.
Note
1. Greedy version
Optimistic Hedgeis a special case ofOptimisticOMDwith the negative entropy as the regularizer.2. Lazy version
Optimistic Hedgeis a special case ofOptimisticFTRLwith the negative entropy as the regularizer.- property cum_loss¶
Get the cumulative loss of the alive base-learners.
- opt_by_gradient(loss_bases: ndarray, loss_meta: float | None = None)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
MSMWC¶
- class pynol.learner.meta.MSMWC(prob: ndarray, lr: float | ndarray | OptimisticLR, optimism_type: str | None = 'external')[source]¶
Bases:
OptimisticMetaImplementation of Impossible Tuning Made Possible: A New Expert Algorithm and Its Applications.
MSMWCstands for Multi-scale Multiplicative-weight with Correction, a multi-scale expert-tracking algorithms that achieves second-order small-loss regret simultaneously for all expert. It can further exploit the knowledge of optimism to achieve tighter bound. The update rule ofMSMWCis as follows,\[ \begin{align}\begin{aligned}p_t = {\arg\min}_{p \in \Delta_N} \ \varepsilon_t \langle p, M_t\rangle + D_R(p, \hat{p}_t)\\\hat{p}_{t+1} = {\arg\min}_{p \in \Delta_N} \ \varepsilon_t \langle p, \ell_t + b_t\rangle + D_R(p, \hat{p}_t),\end{aligned}\end{align} \]where \(\varepsilon_t > 0\) is the step size, \(b_t = \varepsilon_t (\ell_t - M_t)^2\) is the correction term at round \(t\), \(R\) is the weighted regularizer \(R(p) = \sum_{i=1}^N \frac{1}{\varepsilon_{t,i}}p_i \ln p_i\) and \(D_R(\cdot, \cdot)\) is the Bregman divergence with respect to the regularizer \(R\).
- Parameters:
prob (numpy.ndarray) – Initial probability over the base-learners.
lr (float, numpy.ndarray, OptimisticLR) – The learning rate for meta-algorithm.
optimism_type (str, optional) – Type of optimism used for algorithm. Valid actions include
external,last_lossandNone. ifoptimism_type='external', the algorithm will accept the external optimism \(M_t\) at each round; ifoptimism_type='last_loss', the optimism is set as \(M_t = \ell_{t-1}\); and ifoptimism_type=None, the optimism is set as \(M_t = 0\).
References
https://arxiv.org/abs/2102.01046
- opt_by_gradient(loss_bases: ndarray, loss_meta: float | None = None)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
- opt_by_optimism(optimism: ndarray | None)[source]¶
Optimize by the optimism.
- Parameters:
optimism (numpy.ndarray, optional) – the optimism at the beginning of the current round.
- Returns:
None
- project(prob: ndarray, lr: ndarray)[source]¶
Project \(p'\) back to the simplex by
\[p = {\arg\min}_{\Delta_N} \ D_R(p, p')\]where \(R\) is the weighted regularizer \(R(p) = \sum_{i=1}^N \frac{1}{\varepsilon_{i}}p_i \ln p_i\) and \(D_R(\cdot, \cdot)\) is the Bregman divergence with respect to the regularizer \(R\).
- Parameters:
prob (numpy.ndarray) – Probability to be projected.
lr (numpy.ndarray) – Learning rate of the weighted regularizer \(R\).
Prod¶
- class pynol.learner.meta.Prod(N: int, lr: float | ndarray)[source]¶
Bases:
MetaImplementation of Improved Second-Order Bounds for Prediction with Expert Advice and Strongly Adaptive Online Learning.
Prodcan be view as a first-order approximation to weighted majority majority, which is proved to enjoy second-order bounds. The update rule is as follows:\[p_{t+1,i} = (1+\varepsilon_{t,i}) p_{t,i} / W_{t+1},\]where \(\varepsilon_t > 0\) is the learning rate and \(W_{t+1}\) is the normalization constant.
- Parameters:
N (int) – Number of the total base-learners.
lr (float, numpy.ndarray) – Learning rate of meta-algorithm.
References
https://link.springer.com/content/pdf/10.1007/s10994-006-5001-7.pdf
http://proceedings.mlr.press/v37/daniely15.pdf
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- opt_by_gradient(loss_bases, loss_meta)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
AdaNormalHedge¶
- class pynol.learner.meta.AdaNormalHedge(N: int)[source]¶
Bases:
MetaImplementation of Achieving All with No Parameters: AdaNormalHedge.
AdaNormalHedgeis a powerful parameter-free PEA algorithm that attains many interesting data-dependent bounds without any prior information. Notice that when using it as the meta-algorithm to combine base-learners, the input loss should be non-negative.- Parameters:
N (int) – Number of the total base-learners.
References
http://proceedings.mlr.press/v40/Luo15.pdf
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- opt_by_gradient(loss_bases, loss_meta)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
AFLHMeta¶
- class pynol.learner.meta.AFLHMeta(N: int, lr: float | ndarray)[source]¶
Bases:
MetaImplementation of the meta-algorithm of Adaptive algorithms for online decision problems.
AdaNormalHedgeis a powerful parameter-free PEA algorithm that attains many interesting data-dependent bounds without any prior information. Notice that when using it as the meta-algorithm to combine base-learners, the input loss should be non-negative.- Parameters:
N (int) – Number of the total base-learners.
lr (float, numpy.ndarray) – Learning rate for meta-algorithm.
References
https://dominoweb.draco.res.ibm.com/reports/rj10418.pdf
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- opt_by_gradient(loss_bases, loss_meta)[source]¶
Optimize by the true gradient (loss).
All base-algorithms are required to override this method to implement their own optimization process.
- Parameters:
loss_bases (numpy.ndarray) – Losses of all alive base-learners.
loss_meta (float) – Loss of the combined decision.
- Returns:
Probability over the alive base-learners.
- Return type:
numpy.ndarray
schedule¶
pynol.learner.schedule is the component to deal with the non-stationary
environments. This module consists of two main parts: SSP
and Cover. SSP specifies how to initialize the base-learners, which is
important for dynamic algorithms. The dynamic algorithms construct a step size
pool at first, and then initialize multiple base-learners, each employs a
specific step size. The construction is based on exponential discretization of
possible range of the optimal step size that usually depends on unknown
path-length. Cover contains different interval partitions (Cover) that base-learners
will last for, such as data stream cover (DSC), geometric cover (GC), compact GC
(CGC) and its problem-dependent version CPGC, which is important for adaptive
algorithm.
SSP¶
SSP¶
StepSizeFreeSSP¶
- class pynol.learner.schedule.ssp.StepSizeFreeSSP(base_class: Base, num_bases: int, **kwargs_base: dict)[source]¶
Bases:
SSPThe class to initialize step size free base-learners.
- Parameters:
base_class (Base) – Base class to schedule.
num_bases (int) – Number of base-learners.
**kwargs_base (dict) – Parameters of base-learners.
DiscreteSSP¶
- class pynol.learner.schedule.ssp.DiscreteSSP(base_class: Base, min_step_size: float, max_step_size: float, grid: int = 2, **kwargs_base)[source]¶
Bases:
SSPThe most commonly used SSP for dynamic algorithms, which construct a step size pool at first, and then initialize multiple base-learners, each employs a specific step size.
- Parameters:
base_class (Base) – Base class to initialize.
min_step_size (float) – Minimal value of the possible range of the optimal step size.
max_step_size (float) – Maximal value of the possible range of the optimal step size.
grid (int) – Grid size to discretize the possible range of the optimal step size.
**kwargs (dict) – Parameter of the base-learners.
- static discretize(min_step_size: float, max_step_size: float, grid: float = 2.0)[source]¶
Discretize the possible range of the optimal step size exponentially
- Parameters:
min_step_size (float) – Minimal value of the possible range of the optimal step size.
max_step_size (float) – Maximal value of the possible range of the optimal step size.
grid (int) – Grid size to discretize the possible range of the optimal step size.
Cover¶
Cover¶
- class pynol.learner.schedule.cover.Cover(active_state: ndarray, alive_time_threshold: int | None = None)[source]¶
Bases:
ABCThe abstract class for problem-independent cover.
- Parameters:
active_state (numpy.ndarray) – Initial active state.
alive_time_threshold (int, optional) – Minimal interval length for cover. All intervals whose length are less than
alive_time_thresholdwill not be activated.
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- check_threshold()[source]¶
Check the interval length. All intervals whose length are less than
alive_time_thresholdwill not be activated.
- abstract property t¶
Set the number of current round and compute the active state at current round.
FullCover¶
- class pynol.learner.schedule.cover.FullCover(N: int)[source]¶
Bases:
CoverThe cover that sets all base-learners alive all the time, which is used for dynamic algorithms.
- Parameters:
N (int) – Number of base-learners.
- property t¶
Set the number of current round and compute the active state at current round.
GC¶
- class pynol.learner.schedule.cover.GC(N: int, alive_time_threshold: int | None = None)[source]¶
Bases:
CoverGeometric cover is the classical interval partition method, which discretize the whole horizon into sub-intervals with exponential length. Below is an illustration.
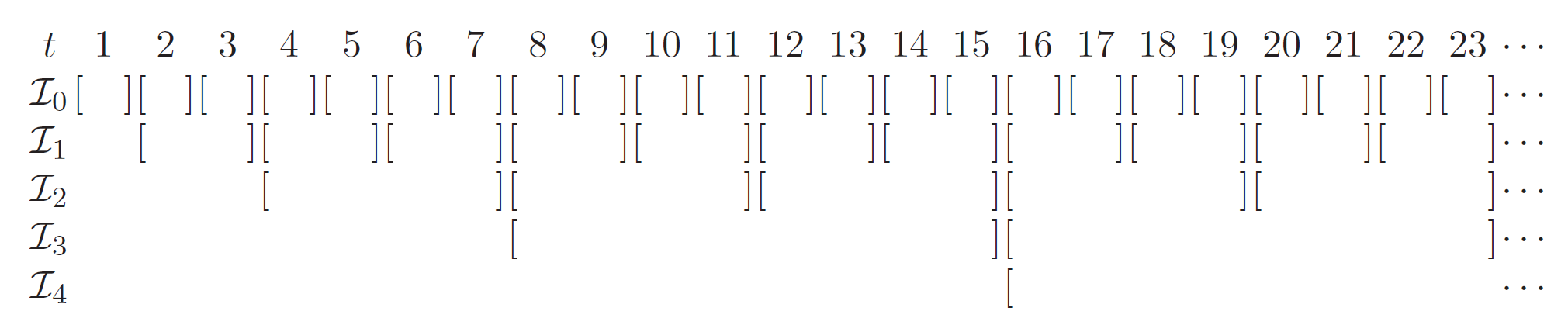
- Parameters:
N (int) – Number of base-learners. \(N=5\) for the above figure.
alive_time_threshold (int, optional) – Minimal interval length for cover. All intervals whose length are less than
alive_time_thresholdwill not be activated.
Below we give an example of
GCwithalive_time_threshold=4: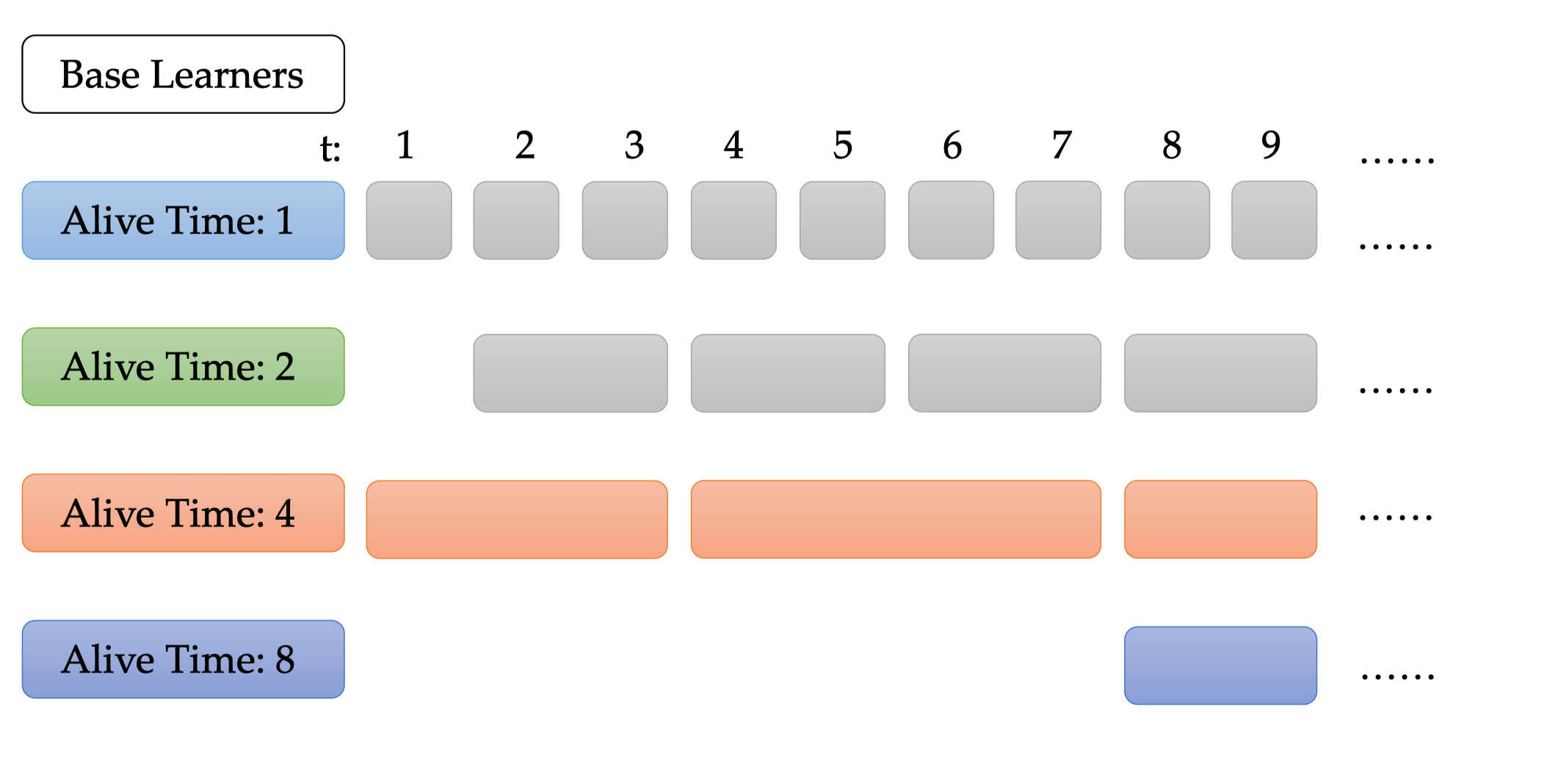
The base-learners whose alive time is less than 4 will not be activated, shown as gray blocks. Since there must be at least one base-learner, we initialize base-learner with
Alive Time = 4att=1.- property t¶
Set the number of current round and compute the active state at current round.
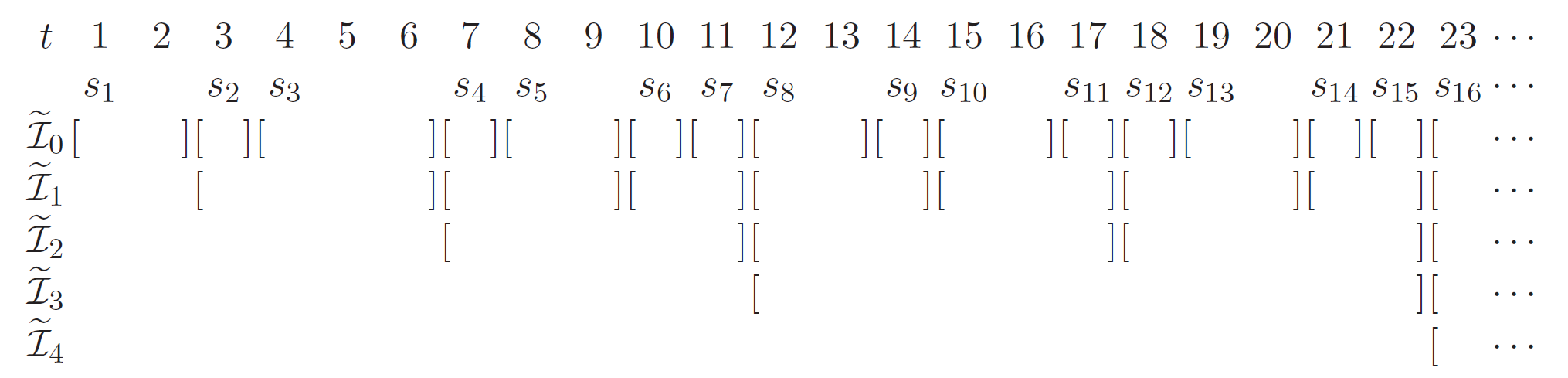
CGC¶
- class pynol.learner.schedule.cover.CGC(N: int, alive_time_threshold: int | None = None)[source]¶
Bases:
GCCGC stands for compact geometric cover which removes some redundant intervals from geometric cover while keeping the desired properties. Below is an illustration.

- Parameters:
N (int) – Number of base-learners. \(N=5\) for the above figure.
alive_time_threshold (int, optional) – Minimal interval length for cover. All intervals whose length are less than
alive_time_thresholdwill not be activated.
- property t¶
Set the number of current round and compute the active state at current round.
PCover¶
- class pynol.learner.schedule.cover.PCover(active_state: ndarray, loss_threshold: float = 2)[source]¶
Bases:
ABCThe abstract class for problem-dependent cover.
- Parameters:
active_state (numpy.ndarray) – Initial active state.
loss_threshold (int, optional) – A new interval is activated only when the cumulative loss of the additional benchmark base-learner is larger than the
loss_threshold.
- property active_state¶
Get the active state of base-learners:
0: sleep
1: active at the current round and the previous round.
2: active at the current round and sleep at the previous round.
- abstract set_instance_loss(loss: float)[source]¶
Set the loss of the additional benchmark base-learner.
- Parameters:
loss (float) – Loss of the additional benchmark base-learner.
- Returns:
Whether to activate a new interval.
- Return type:
bool
- abstract property t¶
Set the number of current round and compute the active state at current round.
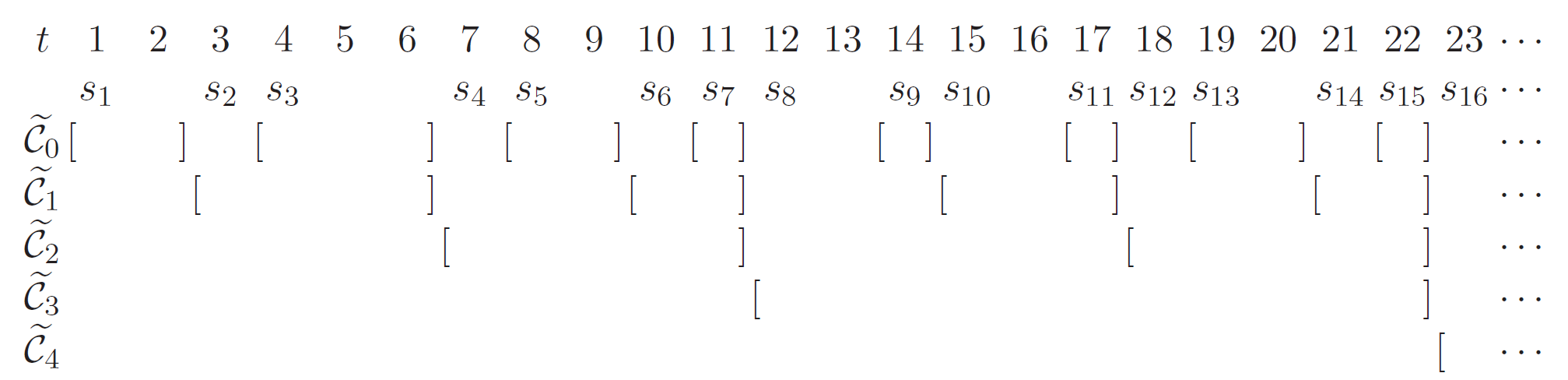
PGC¶
- class pynol.learner.schedule.cover.PGC(N: int, loss_threshold: float = 2)[source]¶
Bases:
PCoverPGC stands for problem-dependent geometric cover, a problem-dependent version of geometric cover. Compared with geometric cover, it can achieve more adaptive results with proper base and meta-algorithms. Below is an illustration.
- Parameters:
active_state (numpy.ndarray) – Initial active state.
loss_threshold (int, optional) – A new interval is activated only when the cumulative loss of the additional benchmark base-learner is larger than the
loss_threshold.
- set_instance_loss(loss: float)[source]¶
Set the loss of the additional benchmark base-learner.
- Parameters:
loss (float) – Loss of the additional benchmark base-learner.
- Returns:
Whether to activate a new interval.
- Return type:
bool
- property t¶
Set the number of current round and compute the active state at current round.
PCGC¶
- class pynol.learner.schedule.cover.PCGC(N: int, loss_threshold: float = 2)[source]¶
Bases:
PGCPCGC stands for problem-dependent compact geometric cover which removes some redundant intervals from problem-dependent geometric cover while keeping the desired properties. Below is an illustration.
- Parameters:
active_state (numpy.ndarray) – Initial active state.
loss_threshold (int, optional) – A new interval is activated only when the cumulative loss of the additional benchmark base-learner is larger than the
loss_threshold.
- property t¶
Set the number of current round and compute the active state at current round.
Schedule¶
Schedule¶
- class pynol.learner.schedule.schedule.Schedule(ssp: SSP, cover: Cover | None = None)[source]¶
Bases:
objectThe class to schedule base-learners with problem-independent cover.
- Parameters:
- opt_by_gradient(env: Environment)[source]¶
Optimize by the gradient for all base-learners.
- Parameters:
env (Environment) – Environment at current round.
- Returns:
- tuple contains:
loss (float): the origin loss of all alive base-learners.
surrogate_loss (float): the surrogate loss of all alive base-learners.
- Return type:
tuple
- opt_by_optimism(optimism: ndarray)[source]¶
Optimize by the optimism for all base-learners.
- Parameters:
optimism (numpy.ndarray) – External optimism for all alive base-learners.
- property optimism¶
Get the optimisms of all alive base-learners.
- Returns:
Optimisms of all alive base learners.
- Return type:
numpy.ndarray
- property t¶
Set the number of current round, get active state from
coverand reinitialize the base-learners whose active state is 2.
- property x_active_bases¶
Get the decisions of all alive base-learners.
- Returns:
Decisions of all alive base learners.
- Return type:
numpy.ndarray
PSchedule¶
- class pynol.learner.schedule.schedule.PSchedule(ssp: SSP, cover: PCover | None = None)[source]¶
Bases:
ScheduleThe class to schedule base-learners with problem-dependent cover.
- Parameters:
- opt_by_gradient(env)[source]¶
Optimize by the gradient for all base-learners.
- Parameters:
env (Environment) – Environment at current round.
- Returns:
- tuple contains:
loss (float): the origin loss of all alive base-learners.
surrogate_loss (float): the surrogate loss of all alive base-learners.
- Return type:
tuple
- opt_by_optimism(optimism: ndarray)[source]¶
Optimize by the optimism for all base-learners.
- Parameters:
optimism (numpy.ndarray) – External optimism for all alive base-learners.
- property optimism¶
Get the optimisms of all alive base-learners.
- Returns:
Optimisms of all alive base learners.
- Return type:
numpy.ndarray
- property t¶
Set the number of current round, get active state from
coverand reinitialize the base-learners whose active state is 2.
- property x_active_bases¶
Get the decisions of all alive base-learners.
- Returns:
Decisions of all alive base learners.
- Return type:
numpy.ndarray
specification¶
Besides Base, Meta and Schedule three main components, the remaining
parts of algorithms are collectively referred to specification, which mainly
includes the design of optimism and surrogate loss. As many algorithms
can be viewed as specials cases of Optimistic Mirror Descent, the construction
of optimism is crucial in algorithmic design. Moreover, replacing original
loss function by surrogate loss is a useful technique which can bring great
benefits sometimes.
SurrogateBase¶
SurrogateBase¶
LinearSurrogateBase¶
- class pynol.learner.specification.surrogate_base.LinearSurrogateBase[source]¶
Bases:
SurrogateBaseThe class defines the linear surrogate loss function for base-learners.
- compute_surrogate_base(variables)[source]¶
Compute the surrogate loss functions and surrogate gradient (if possible) for base-learners.
Replace original convex function \(f_t(x)\) with
\[f'_t(x)=\langle \nabla f_t(x_t),x - x_t \rangle,\]for all base-learners, where \(x_t\) is the submitted decision at round \(t\). Since the gradient of any decision for the linear function is \(\nabla f_t(x_t)\), this method will return it also to reduce the gradient query complexity for base-learners.
- Parameters:
variables (dict) – intermediate variables of the learning process at current round.
- Returns:
- tuple contains:
surrogate_func (Callable): Surrogate function for base-learners.
surrogate_grad (numpy.ndarray): Surrogate gradient for base-learners.
- Return type:
tuple
InnerSurrogateBase¶
- class pynol.learner.specification.surrogate_base.InnerSurrogateBase[source]¶
Bases:
SurrogateBaseThe class defines the inner surrogate loss function for base-learners.
- compute_surrogate_base(variables)[source]¶
Compute the surrogate loss functions and surrogate gradient (if possible) for base-learners.
Replace original convex function \(f_t(x)\) with
\[f'_t(x)=\langle \nabla f_t(x_t), x \rangle,\]for all base-learners, where \(x_t\) is the submitted decision at round \(t\). Since the gradient of any decision for the inner function is \(\nabla f_t(x_t)\), this method will return it also to reduce the gradient query complexity for base-learners.
- Parameters:
variables (dict) – intermediate variables of the learning process at current round.
- Returns:
- tuple contains:
surrogate_func (Callable): Surrogate function for base-learners.
surrogate_grad (numpy.ndarray): Surrogate gradient for base-learners.
- Return type:
tuple
OptimismBase¶
OptimismBase¶
EnvironmentalOptimismBase¶
- class pynol.learner.specification.optimism_base.EnvironmentalOptimismBase[source]¶
Bases:
OptimismBaseThe class indicates the base-learner will use the environmental optimism.
LastGradOptimismBase¶
- class pynol.learner.specification.optimism_base.LastGradOptimismBase[source]¶
Bases:
OptimismBaseThe class will set the optimism \(m_{t+1}\) of the base-learners as \(m_t = \nabla f_{t-1}(x_{t-1})\), where \(x_{t-1}\) is the submitted decision at round \(t-1\).
SurrogateMeta¶
SurrogateMeta¶
SurrogateMetaFromBase¶
- class pynol.learner.specification.surrogate_meta.SurrogateMetaFromBase[source]¶
Bases:
SurrogateMetaThe class will set the surrogate loss of meta-algorithm as the surrogate loss of base-learners.
InnerSurrogateMeta¶
- class pynol.learner.specification.surrogate_meta.InnerSurrogateMeta[source]¶
Bases:
SurrogateMetaThe class defines the inner surrogate loss for meta-algorithm.
InnerSwitchingSurrogateMeta¶
- class pynol.learner.specification.surrogate_meta.InnerSwitchingSurrogateMeta(penalty: float, norm: int = 2, order: int = 2)[source]¶
Bases:
SurrogateMetaThe class defines the inner surrogate loss with switching cost for meta-algorithm.
- Parameters:
penalty (float) – Penalty coefficient of switching cost term.
norm (int) – Order of norm \(p\).
order (int) – Order of switching cost \(q\).
OptimismMeta¶
OptimismMeta¶
- class pynol.learner.specification.optimism_meta.OptimismMeta(is_external: bool = True)[source]¶
Bases:
ABCThe abstract class defines the optimism for meta-algorithm.
- is_external¶
Indicates the optimism of meta-algorithm depends on the optimism given by the environment or computed by the algorithm itself. The default is True.
- Type:
bool
InnerSwitchingOptimismMeta¶
- class pynol.learner.specification.optimism_meta.InnerSwitchingOptimismMeta(penalty: float, norm: int = 2, order: int = 2)[source]¶
Bases:
OptimismMetaThe abstract class defines the inner function with switching cost to compute the optimism for meta-algorithm.
- Parameters:
penalty (float) – Penalty coefficient of switching cost term.
norm (int) – Order of norm \(p\).
order (int) – Order of switching cost \(q\).
InnerOptimismMeta¶
- class pynol.learner.specification.optimism_meta.InnerOptimismMeta[source]¶
Bases:
InnerSwitchingOptimismMetaThe abstract class defines the inner function to compute the optimism for meta-algorithm.
Note
InnerOptimismMetais a special case ofInnerSwitchingOptimismwithpenalty = 0.
SwordVariationOptimismMeta¶
- class pynol.learner.specification.optimism_meta.SwordVariationOptimismMeta[source]¶
Bases:
OptimismMetaThe optimism of meta-algorithm used in SwordVariation.
- compute_optimism_meta(variables)[source]¶
set the optimism for meta-algorithm as \(M_{t,i} = \langle \nabla f_{t-1}(\bar{x}_t), x_{t,i} \rangle\) with \(\bar{x}_t = \sum_{i=1}^N p_{t-1,i}x_{t,i}\), where \(x_{t,i}\) is the decision of the base-learner \(i\) at round \(t\), and \(p_{t-1}\) is the decision of meta-algorithm at round \(t-1\).
SwordBestOptimismMeta¶
- class pynol.learner.specification.optimism_meta.SwordBestOptimismMeta[source]¶
Bases:
OptimismMetaThe optimism of meta-algorithm used in SwordBest, who learn two optimism sequence via another expert-tracking algorithm.
- compute_optimism_meta(variables)[source]¶
To achieve the best-of-both-worlds results, this method will learn the best optimism from two optimism sequence \(M_t^v= \nabla f_{t-1}(\bar{x}_t), \bar{x}_t = \sum_{i=1}^{N_1} p_{t-1,i}x_{t,i}^v + \sum_{i=N_1+1}^{N_2} p_{t-1,i}x_{t,i}^s\) and \(M_t^s = 0\). The final optimism is set as \(\langle M_t^b, x_{t,i} \rangle\) with \(M_t^b = \beta_t M_t^v + (1-\beta_t)M_t^s\), where \(\beta_t\) is updated by
\[\beta_t = \frac{\exp(-2\sum_{s=1}^{t-1}\lVert\nabla f_s(x_s)-M_t^v\rVert_2^2)}{\exp(-2\sum_{s=1}^{t-1}\lVert\nabla f_s(x_s)-M_t^v\rVert_2^2) + \exp(-2\sum_{s=1}^{t-1}\lVert\nabla f_s(x_s)\rVert_2^2)}.\]
Perturbation¶
Perturbation¶
- class pynol.learner.specification.perturbation.Perturbation[source]¶
Bases:
ABCThe abstract class for gradient estimation in bandit setting.
- abstract compute_loss(env: Environment)[source]¶
Get the loss of the perturbed decision(s).
- abstract construct_grad(env: Environment)[source]¶
Estimate the gradient.
OnePointPerturbation¶
- class pynol.learner.specification.perturbation.OnePointPerturbation(domain, scale_perturb)[source]¶
Bases:
PerturbationThe abstract class for gradient estimation in bandit setting with one-point feedback.
- Parameters:
domain (Domain) – Feasible set for decisions.
scale_perturb (float) – Scale of perturbation.
- compute_loss(env: Environment)[source]¶
Get the loss of the perturbed decision(s).
TwoPointPerturbation¶
- class pynol.learner.specification.perturbation.TwoPointPerturbation(domain, scale_perturb)[source]¶
Bases:
PerturbationThe abstract class for gradient estimation in bandit setting with two-point feedback.
- Parameters:
domain (Domain) – Feasible set for decisions.
scale_perturb (float) – Scale of perturbation.
- compute_loss(env: Environment)[source]¶
Get the loss of the perturbed decision(s).
models¶
Model¶
- class pynol.learner.models.model.Model(schedule: Schedule, meta: Meta, surrogate_base: SurrogateBase | None = None, optimism_base: OptimismBase | None = None, surrogate_meta: SurrogateMeta | None = None, optimism_meta: OptimismMeta | None = None, perturbation: Perturbation | None = None)[source]¶
Bases:
objectCombines several main components into the final algorithm.
- Parameters:
schedule (Schedule) – Schedule method, refer to
pynol.schedule.schedule.meta (Meta) – Meta algorithm, refer to
pynol.meta.surrogate_base (SurrogateBase) – Surrogate loss class for base-learners, refer to
pynol.specification.surrogate_base.optimism_base (OptimismBase) – Optimism class for base-learners, refer to
pynol.specification.optimism_base.surrogate_meta (SurrogateMeta) – Surrogate loss class for meta-algorithm, refer to
pynol.specification.surrogate_meta.optimism_base – Optimism class for meta-algorithm, refer to
pynol.specification.optimism_meta.perturbation (Perturbation) – Perturbation class used in bandit setting.
- compute_internal_optimism(variables)[source]¶
Compute the internal optimism.
- Parameters:
variables (dict) – Intermediate variables at the current round.
- opt(env: Environment)[source]¶
The optimization process of the base algorithm.
All algorithms are divided into two parts:
opt_by_optimism()at the beginning of current round andopt_by_gradient()at the end of current round.- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): Decision at the current round.
loss (float): Origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
- opt_by_gradient(env: Environment)[source]¶
Optimize by the true gradient.
- Parameters:
env (Environment) – Environment at the current round.
- Returns:
- tuple contains:
x (numpy.ndarray): the decision at the current round.
loss (float): the origin loss at the current round.
surrogate_loss (float): the surrogate loss at the current round.
- Return type:
tuple
Dynamic¶
Ader¶
- class pynol.learner.models.dynamic.ader.Ader(domain: Domain, T: int, G: float, surrogate: bool = True, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Adaptive Online Learning in Dynamic Environments.
Ader is an online algorithm designed for optimizing dynamic regret for general convex online functions, which is shown to enjoy \(\mathcal{O}(\sqrt{T(1+P_T)})\) dynamic regret.
- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
G (float) – Upper bound of gradient.
surrogate (bool) – Whether to use surrogate loss.
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
https://proceedings.neurips.cc/paper/2018/file/10a5ab2db37feedfdeaab192ead4ac0e-Paper.pdf
PBGDOnePoint¶
- class pynol.learner.models.dynamic.pbgd.PBGDOnePoint(domain: Domain, T: int, C: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Bandit Convex Optimization in Non-stationary Environments.
PBGDOnePointstands for Parameter-free Bandit Gradient Descent with One-Point feedback, which is a parameter-free algorithm for optimizing dynamic regret for general convex function with one-point feedback. Is is shown to enjoy \(\mathcal{O}(T^{\frac{3}{4}}(1+P_T)^{\frac{1}{2}})\) dynamic regret.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
C (float) – Upper bound of loss value.
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
PBGDTwoPoint¶
- class pynol.learner.models.dynamic.pbgd.PBGDTwoPoint(domain: Domain, T: int, L_lipschitz: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Bandit Convex Optimization in Non-stationary Environments.
PBGDTwoPointstands for Parameter-free Bandit Gradient Descent with Two-Point feedback, which is a parameter-free algorithm for optimizing dynamic regret for general convex function with two-point feedback. Is is shown to enjoy \(\mathcal{O}(\sqrt{T(1+P_T)})\) dynamic regret.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
L_lipschitz (float) – Lipschitz constant for loss functions.
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
SwordVariation¶
- class pynol.learner.models.dynamic.sword.SwordVariation(domain: Domain, T: int, G: float, L_smooth: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelSwordVariationenjoys a gradient-variation dynamic regret bound of \(\mathcal{O}(\sqrt{(1 + P_T + V_T)(1 + P_T)})\), where \(V_{T}=\sum_{t=2}^{T} \sup_{\mathbf{x} \in \mathcal{X}}\left\|\nabla f_{t-1}(\mathbf{x})-\nabla f_{t}(\mathbf{x})\right\|_{2}^{2}\) is the gradient variation of online functions.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
G (float) – Upper bound of gradient.
L_smooth (float) – Smooth constant of online loss functions
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
https://proceedings.neurips.cc/paper/2020/file/939314105ce8701e67489642ef4d49e8-Paper.pdf
SwordSmallLoss¶
- class pynol.learner.models.dynamic.sword.SwordSmallLoss(domain: Domain, T: int, G: float, L_smooth: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelSwordSmallLossenjoys a small-loss dynamic regret bound of \(\mathcal{O}(\sqrt{(1 + P_T + F_T)(1 + P_T)})\), where \(F_T =\sum_{t=1}^T f_t(u_t)\) is the cumulative loss of the comparator sequence.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
G (float) – Upper bound of gradient.
L_smooth (float) – Smooth constant of online loss functions
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
SwordBest¶
- class pynol.learner.models.dynamic.sword.SwordBest(domain: Domain, T: int, G: float, L_smooth: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelSwordBestenjoys a best-of-both-worlds dynamic regret bound of \(\mathcal{O}(\sqrt{(1 + P_T + \min\{V_T, F_T\})(1 + P_T)})\), where \(V_{T}=\sum_{t=2}^{T} \sup_{\mathbf{x} \in \mathcal{X}}\left\|\nabla f_{t-1}(\mathbf{x})-\nabla f_{t}(\mathbf{x})\right\|_{2}^{2}\) is the gradient variation of online functions, \(F_T =\sum_{t=1}^T f_t(u_t)\) is the cumulative loss of the comparator sequence.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
G (float) – Upper bound of gradient.
L_smooth (float) – Smooth constant of online loss functions
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
Sword++¶
- class pynol.learner.models.dynamic.swordpp.SwordPP(domain: Domain, T: int, G: float, L_smooth: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Adaptivity and Non-stationarity: Problem-dependent Dynamic Regret for Online Convex Optimization.
Swordppis an improved version ofSword, who reduces the gradient query complexity of each round from \(\mathcal{O}(\log T)\) to \(1\) and achieves the best-of-both-worlds dynamic regret bounds by a single algorithm.References
Scream¶
- class pynol.learner.models.dynamic.scream.Scream(domain: Domain, T: int, G: float, penalty: float, min_step_size: float | None = None, max_step_size: float | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Non-stationary Online Learning with Memory and Non-stochastic Control.
Screamis designed the optimize the dynamic regret for online convex optimization with switching cost. In the technical aspect, it neatly solves the challenge of controlling the switching cost in the meta-base two-layer structure while enjoying the desired dynamic regret bound. It is shown to enjoy \(\mathcal{O}(\sqrt{T(1+P_T)})\) dynamic regret with switching cost.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
G (float) – Upper bound of gradient.
penalty (float) – Penalty coefficient of switching cost.
min_step_size (float) – Minimal step size for the base-learners. It is set as the theory suggests by default.
max_step_size (float) – Maximal step size for the base-learners. It is set as the theory suggests by default.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
Adaptive¶
AFLH¶
- class pynol.learner.models.adaptive.aflh.AFLH(domain: Domain, T: int, lr: float | ndarray | None = None, surrogate: bool = True, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Adaptive Algorithms for Online Decision Problems and Minimizing Adaptive Regret with One Gradient per Iteration.
AFLHis an online algorithm optimizing the weak adaptive regret. With its neat meta-based design, for convex functions AFLH achieves regret of order \(R(T)+\mathcal{O}(\sqrt{T}\log T)\) on each interval \(I\in[T]\), which \(R(T)\) is the regret of any black-box base algorithm and \(\mathcal{O}(\sqrt{T}\log T)\) is the regret overhead incurred by the meta-algorithm.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
lr (float, numpy.ndarray, optional) – Learning rate for meta-algorithm.
prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
SAOL¶
- class pynol.learner.models.adaptive.saol.SAOL(domain: Domain, T: int, alive_time_threshold: int | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Strongly Adaptive Online Learning.
SAOLis the online algorithm aiming to optimize strongly adaptive regret. It can leverage small-regret online algorithm and enjoy the strongly adaptive regret in order of \(R(|I|)+\mathcal{O}(\sqrt{|I|}\log T)\) on each interval \(I \in [T]\), which \(|I|\) is the length of the interval \(I\).- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
alive_time_threshold (int, optional) – Minimal alive time for base-learners. All base-learners whose alive time are less than
alive_time_thresholdwill not be activated.prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
SACS¶
- class pynol.learner.models.adaptive.sacs.SACS(domain: Domain, T: int, alive_time_threshold: int | None = None, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Adaptive Regret of Convex and Smooth Functions.
SACSexploits the smoothness condition to achieve small-loss strongly adaptive regret of order \(\mathcal{O}(\sqrt{L_r^s \log s \cdot \log(s-r)})\), where \(L_r^s = \min_{x\in \mathcal{X}}\sum_{t=r}^s f_t(x)\). This bound could be much smaller than \(\mathcal{O}(\sqrt{(s-r) \log s})\) when \(L_s^r\) is small.- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
alive_time_threshold (int, optional) – Minimal alive time for base-learners. All base-learners whose alive time are less than
alive_time_thresholdwill not be activated.prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
References
PSACS¶
- class pynol.learner.models.adaptive.sacs.PSACS(domain: Domain, T: int, loss_threshold: float = 1.0, prior: list | ndarray | None = None, seed: int | None = None)[source]¶
Bases:
ModelImplementation of Adaptive Regret of Convex and Smooth Functions.
PSACSfurther improves the performance by problem-dependent intervals and obtains strongly adaptive regret of order \(\mathcal{O}(\sqrt{L_r^s \log L_1^s \cdot L_r^s})\), where \(L_r^s = \min_{x\in \mathcal{X}}\sum_{t=r}^s f_t(x)\).- Parameters:
domain (Domain) – Feasible set for the algorithm.
T (int) – Total number of rounds.
loss_threshold (float, optional) – A new interval is activated only when the cumulative loss of the additional benchmark base-learner is larger than the
loss_threshold.prior (str, numpy.ndarray, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.
seed (int, optional) – The initial decisions of all base-learners are set as domain(prior=prior, see=seed) for the algorithm.